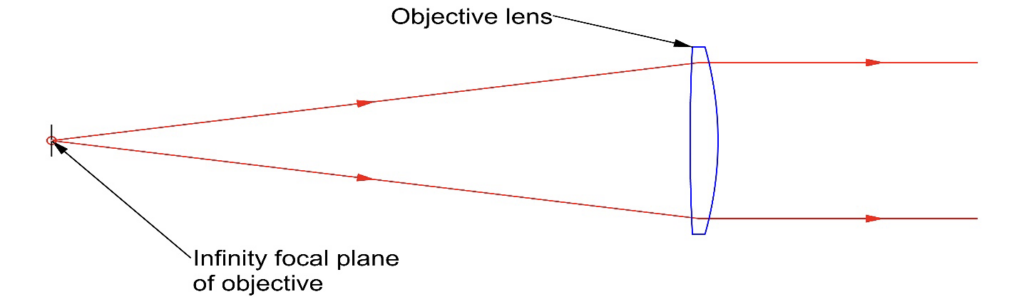
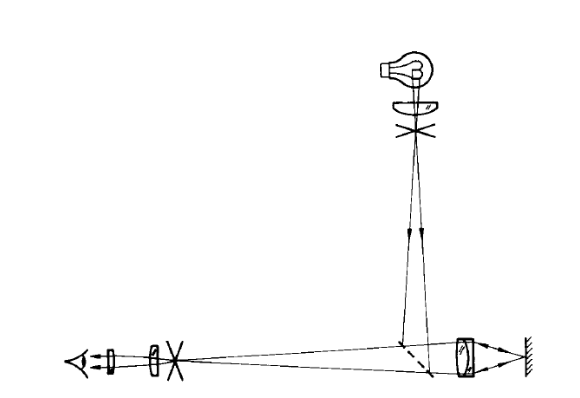
Fig. 1 A simple collimator with a point source of illumination. An illuminated target in the same plane could serve as the source.
Collimators are used as a light source for testing camera lenses on a nodal slide optical bench. The collimator simulates a point source, or in astronomical terms, a star, at infinity. For lens testing, the focal length of the collimator is typically 5 times or more the focal length of the lens under test so that the star appears “perfect” to the lens under test. Collimators are also used in MTF measuring instruments to project targets with a structured pattern into the lens under test to measure the lens quality.
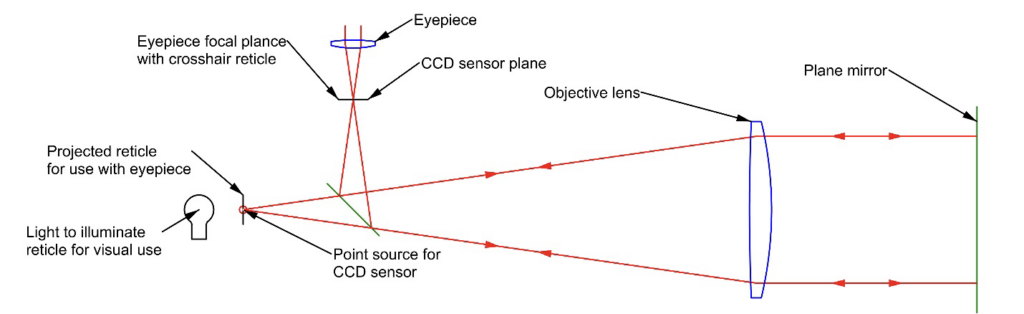
An autocollimator (AC) is a collimator with a beamsplitter and an eyepiece so you can see where the reflected “star” falls in the eyepiece of the instrument, as in Fig. 2. A common method of packaging an AC is with a precision ground barrel designed to mate with a mount so that the axis of the barrel can be adjusted in 4 degrees of freedom (DOF). The reticle crosshair in the AC is centered on the axis of the barrel. When the AC barrel axis is normal to a plane mirror in front of the AC, the reflected image from the mirror will be centered on the crosshair and will not move when the AC is rotated about its axis.
Fig. 2 Simple autocollimator shown for visual use, or for a point source and digital camera.
For autocollimators that do not have a mechanical reference axis such as a precision barrel, a cube corner reflector is used to center the reference crosshair on the axis of the instrument. The cube corner reflects light back upon itself so an image of the source as seen in the eyepiece is centered on the source. The crosshair in the eyepiece is set to zero on the image of the source.
Notice that an AC is only sensitive to two DOF, the two angles the plane mirror is tipped from being normal to the axis of the AC. Typical barrel type ACs have a full field of view of about +/- 1° but the reticle is labelled to give the angle between the plane mirror and the axis of the AC, or +/- 30 are minutes.
Fig. 3 Nikon autocollimator fitted with a digital camera (from Nikon online catalog)
Notice that ACs cannot be used without some auxiliary hardware because all they measure is departure from normal. As an example, assume the AC, mounted vertically looking downward, is zeroed out against a plane surface such as the base of the Nikon instrument. Then the AC measures parallelism when sample plane mirrors or windows are set on the base plane surface. They are also useful for measuring errors in prism angles where the faces of the prisms are parallel to each other looking through the prism.
Another instrument in this class is the alignment telescope (AT), an AC with more parts to give it more functionality. We use an AT to determine where an axis is or use it to set up an axis because the AT focuses in any plane between the instrument and infinity. This gives information to determine a line, 4 DOF, in space rather than just two angles.
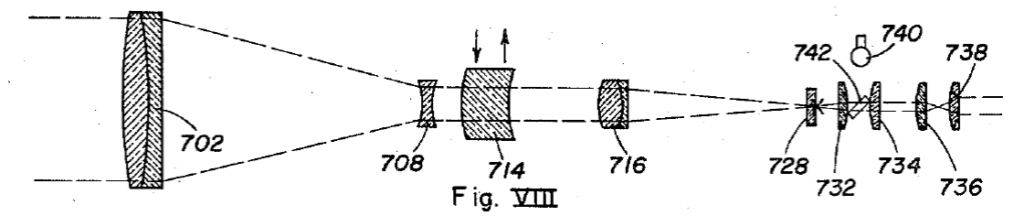
I have used Fig. VIII from the 1957 Kueffel AT US Patent 2,784,641 in Fig. 4 to show the optically important parts. Starting at the left there is a Galilean 5:1 reverse beam expander and a meniscus element (714) which if decentered, decenters the field of view in the eyepiece, without changing the focus. This is followed by a Newtonian telescope (716) focused on a crosshair reticle that is projected from the AT. Following the reticle is a beamsplitter to bring in a light source, and an erecting eyepiece so the view is right side up when viewing thorough the telescope.
The objective (716) on the Newtonian telescope is used to focus the AT from very close to the front of the instrument all the way to infinity in an almost perfect straight line. Because the aperture and corresponding focal length are about 5 times smaller than the main objective (702), the distance the Newtonian objective must move to achieve this large focus range is very much reduced from moving the main objective.
As opposed to an AC, an AT determines 4 DOF, and thus an axis. It does so by first focusing on a far target, and then on a close target. When both targets are centered on the crosshair in the AT, the axis of the AT is coaxial with the line between the two targets. Making this adjustment is a little trickier than it first sounds. It is an iterative process, and the adjustments must be made in the right order, or you get farther and farther from alignment.
When focused on the far target, change the angle of the AT tube to bring the far target on the crosshair. When focused on the near target, translate the AT to bring the near target on the crosshair. Even following this order of adjustments, you are usually not rotating about the optimum center, so you end up either over or under-shooting the angle adjustment. With patience good alignment is achieved to the precision of the instrument and your ability to set the target on the crosshair.
Since this is a rather long blog, I will put off a discussion of the last instrument, the autostigmatic microscope until next week. I will also discuss a few mechanical gauges and tools that complement optical alignment tools.
In the Introduction to this series of articles on optical alignment, I said there were three basic methods of alignment. This article presents my thoughts on these methods. My approach may be a bit unconventional, but I hope this way of beginning makes the whole idea of alignment easier to understand. To illustrate the three approaches, I will consider the case of a concave mirror as an initial example.
(After reviewing this note it is clear I have not discussed the tools used for alignment such as autocollimators and alignment telescopes. I will do that in the next article, so you know the details of each instrument and have some idea of its sensitivity and range of measurement before I discuss each of the 3 methods of alignment in detail.)
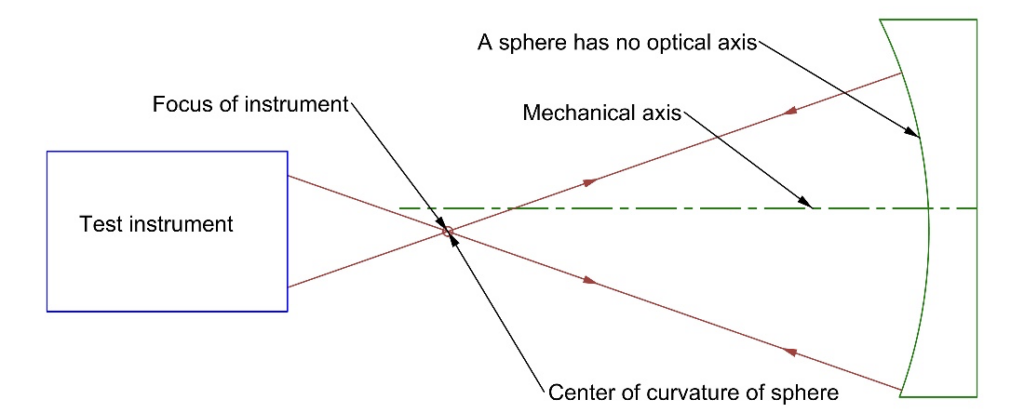
The three methods are 1) exact alignment, 2) alignment by aberration and 3) alignment with a Bessel beam. The exact alignment method should be familiar to everyone and is most easily illustrated by means of a concave, spherical mirror. The center of curvature of a spherical mirror, or surface, is found by focusing an alignment telescope (AT), an interferometer (INT) or an autostigmatic microscope (ASM) at the center of curvature as in Fig. 1. When the reflected light is centered on the cross hair of the AT or ASM, or there are no tilt fringes in the (INT), the focus of the test instrument is at the center of curvature, a point, in 3 translational degrees of freedom (DOF).
Fig. 1 Alignment instrument at center of curvature of a sphere, a point defined by 3 DOF
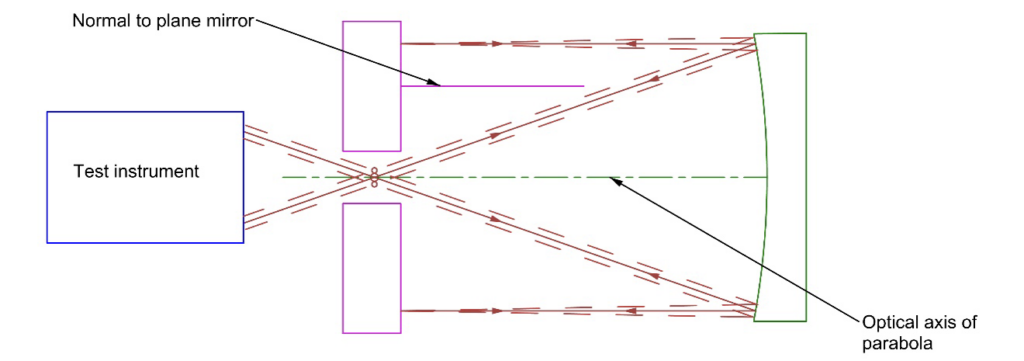
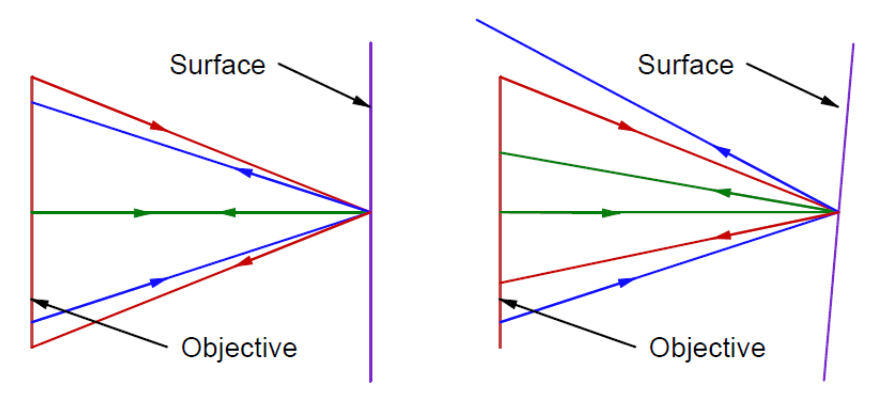
The second method, alignment using aberrations, is best illustrated by thinking of aligning a concave, parabolic mirror autocollimated with a plane mirror as in Fig. 2. Here the test instrument is at the focus of the parabola looking at the reflected image in a double pass test arrangement. Unless the plane mirror is tilted precisely perpendicular to the optical axis of the parabola, the reflected image will not be centered on the crosshair or tilt free interferometer. The plane mirror is first tilted in 2 degrees of freedom (DOF) to center the reflected light on the test instrument. Unless you are extremely lucky, the centered image will be comatic or aberrated. You use the coma to adjust the tilt of the plane mirror while keeping the image focused on the crosshair while reducing the coma as much as possible to achieve alignment.
The dashed lines in Fig. 2 show that when the focus of the reflected light does not return coincident with the focus of the outgoing light, the rays are not normally incident on the plane mirror. This amounts to retrace error, a term from interferometry, where the reflected rays follow a different path than the incident ones. This is why the return spot of light must be kept centered while reducing aberrations.
Fig. 2 Alignment of a parabola using aberrations. The outgoing rays must be coincident with reflected rays and the normal to the plane mirror parallel to the axis of the parabola to eliminate aberrations
These two methods are simultaneously similar but different. I call the first method exact because depending on the sensitivity of the test instrument, you can locate the center of curvature to less than 1 um, and often better assuming you have a good test environment. This is about as exact as you can get, and the degree of precision is largely independent of the f/# or cone of light the mirror subtends. On the other hand, you have only located the mirror in 3 translational degrees of freedom, because a sphere is a point in space if its radius is reduced to zero, and a point is defined by only 3 translational DOF. The corollary to this is that a sphere, or spherical mirror, has no optical axis. It does have a mechanical axis defined by its periphery, but no optical axis because it is still a sphere no matter how it is rotated about its center of curvature.
The parabola, however, does have an optical axis given to it by the slight departure from a pure spherical shape by its being a parabola. The same goes for any asphere. When the reflected light comes back to the test instrument centered, all this guarantees is that the light collimated by the parabola is incident on the flat mirror normally. It does not mean the flat is perpendicular to the optical axis of the parabola. This takes two more DOF to satisfy this condition and if the condition is not satisfied, you have coma. It then becomes a matter of how sensitive you are to the coma, the aberration, with your test instrument to determine how well you can align the parabola. This sensitivity governs which test instrument you must use to achieve the desired degree of alignment.
(Sidebar – A further consequence of the difference between a sphere and an asphere is that a spherical wavefront remains spherical independent of how far it propagates because all lines from its center of curvature intersect the sphere at normal incidence. This is not the case for an aspheric wavefront. It changes shape as it propagates. To see why to first order, consider an off axis ray from the center of curvature of a parabola, or any asphere. From similar triangles the ratio of y/R is constant as the ray propagates. The difference between a sphere and asphere is proportional to y^4/R^3 and this ratio is not constant.)
You may ask why can’t I use the center of curvature and the focus of the parabola to use the exact method to do the alignment? In theory, you can, as some textbooks show. However, in practice it is difficult to simultaneously view both the center of curvature and focus. This is why aberrations are generally used in this alignment situation. In turns out there are many similar situations where it is easy to draw pictures of optical tests, but it is difficult to impossible in practice to get to the required centers of curvature to do exact alignment. Then you are forced to use aberrations.
However, alignment with aberrations is a bit tricky because at the beginning of alignment the aberrations will be large and it is not always obvious whether your adjustments are making the aberrations worse or better. This is why you will want to stop down the aperture of the system to reduce the aberrations to the point where you can make sense of them and see that you are going in the right direction to reduce the aberrations. Just as when using a microscope to examine a specimen, you start with the lowest magnification objective to locate the feature of interest and then switch to higher and higher power objectives using the turret.
(Sidebar – The first time you attempt to align some optical component always presents you with the worst possible alignment situation. You have no idea how sensitive any part of the setup is to being in the correct location before the next is added. It is not obvious which adjustment to make first, or even which way to turn the adjustment to make the alignment better. It is very frustrating, particularly if you are working alone and there is no one to ask for advice. There are also times when it is best to work alone; too many cooks… This is why I am excited about the third method of alignment. It is pretty easy to see what you are doing because you have direct feedback.)
The third method of alignment uses a Bessel beam. This is a new method under development because we have recently shown a Bessel beam propagates through an optical system as though it was a single paraxial ray [1]. With a paraxial ray, if you know the ray height as it comes from infinity and enters the first surface, first order optics tells you the height and angle the ray will exit the lens. The plane within the lens where the two paraxial rays intersect, the principal plane, tells us where the lens is along the optical axis of the system (1 DOF) and the equation of the optical axis of the lens determines the remaining 4 DOF. Since simple optical systems have rotational symmetry, the Bessel beam is all that is needed to locate the lens in 5 DOF. We will have more to say about this new method of alignment as we proceed.
In the next couple articles, I will discuss each of the three methods of alignment in more detail to give a better idea where one or the other is more useful depending on other considerations, for example, what equipment you have on hand. Speaking of equipment, I will discuss typical instruments used for optical alignment.
REFERENCES:
[1] Parks, R. and Kim, D., “Physical ray tracing with Bessel beams”, Proc. Winter Topical Meeting, Precision Optical Metrology Workshop, pp. 72-6, ASPE (2023)
Introduction to a Series of Articles on Optical Alignment
For some time, I have been encouraged to write a book about optical alignment. There have been several half-hearted attempts at beginning, but it never seemed there was enough to talk about and I kept finding new ideas about alignment. I didn’t want the book to be out of date before it was ever published. For this reason, I have a fresh approach for starting again.
The book will be written as sort of a blog with each stand-alone part being a piece of the bigger picture. It will be a little like Charles Dickens who wrote his novels as serials with a chapter published weekly. This will be a little more complicated, as I feel there are three basic methods of alignment and I want to contrast the three as the serial is written. To help with this scheme, I will also use a set of example systems to illustrate the methods, and the systems will get more complex as the serial develops.
Along the way I intend to toss in tips and references about performing various steps in alignment. For example, if when you first look at an image or interferogram and it looks like a bowl of spaghetti because there is so much aberration it is hard to know where to start, simply stop the system down to reduce the aberrations until it becomes apparent which is the most offending aberration. Then you will have an idea for corrective action. As the alignment is improved, you can increase the stop size until eventually you are viewing the full aperture. Alignment is, after all, governed by paraxial optics.
Before getting into any details, I want to say a few words about why alignment is important and why there is any need for a series such as this. With modern computers and the work of some very smart people, the optical design of lenses and mirrors are about as good as can be achieved. Perhaps a new glass will come along that will help with a certain design defect but this is a detail in the bigger picture, lens design will probably not get much better than it already is.
In addition, with modern CNC polishing techniques and interferometric testing you can get about any degree of optical surface quality you want. Once you have 0.1 rms wave surfaces, even if you have a system with many such surfaces, you are not really going to improve your system performance by asking for 0.05 rms wave surfaces, at least in the visible. The only way to improve the performance of an optical system these days is to put it together more precisely, that is, to align your system better. In this area there is a long way to go for several reasons.
The main reason there is room for improvement is that the design of a system and its assembly are far apart in time and space. By the time hardware shows up in the assembly area, the design people are working on a whole new project. In addition, the designers and assembly people have entirely different skill sets and speak different jargon. There are mechanical engineers in between the two groups but they often hinder communication between the two rather than improve it. My hope is that this set of articles will help improve the situation.
This gives you some idea of where this project is headed. Consider the material a draft that may eventually get organized into a real book, but for a long time it will remain fluid and subject to revision. I solicit your help in this regard. If after reading these articles you have a comment, suggestion or to point out an error in my thinking, please let me know. My background is limited and if you can share your experiences, it will only make this effort better. All additions to the text will be acknowledged unless you wish to remain anonymous.
One other matter about the organization of the material, I would like to keep the text and ideas as simple as possible so that the articles can be read and appreciated by people with any skill set. There are people who may want more detail, and I will try to keep these more detailed explanations as side bars for the more interested. I will try to make this detailed material obvious, and suggest it be ignored by those who want just the basic ideas. This is in line with my feeling that when you push an engineering problem hard enough it becomes science, interesting science, but stopping to look at the science doesn’t necessarily get the hardware out the door, the thing your boss wants most.
Back in the late 1990’s NIST had a number of firms that wanted to send their interferometer transmission spheres there for calibration but NIST was not in this sort of calibration business. While I was at NIST consulting for Chris Evans in the Precision Machining Facility we thought of the idea of a self-calibration test for transmission spheres that was a spherical analog of the plane surface test(1) used to self-calibrate interferometric surface roughness testing microscopes. We called our method the Random Ball Test (RBT). It relied on averaging multiple interferograms of random patches of a precisely polished ball. The test worked as expected and we published the results in a fairly obscure meetings proceedings(2).
While the RBT worked as we expected and provided the desired method of self-calibration, it was not a practical method because it used a ball made of black filter glass that was rather soft and easily damaged. The glass had to be opaque to eliminate a coherent reflection from the far side of the ball. Another ball was made of harder, transparent glass where a small hole was drilled through the center of the ball to block this reflection but this made the ball more expensive and the surface not completely random. The idea was left as an interesting exercise that solved a serious calibration problem but had little practical value.
About 5 years later I became aware of commercially available, precision silicon nitride balls and these made it look like the RBT could be commercialized. The CaliBall™ was first marketed in 2005 and well over 300 have sold since then. The 1” diameter, Grade 5, silicon nitride ball is extremely hard and tough, has a reflectivity of about 11%, a good compromise for use with both uncoated and highly reflective transmission spheres, and resists stains and finger prints much better than steel balls. Further, the SiN balls do not dent as some steel balls do with mishandling.
In the random ball test the ball artifact, sitting on a kinematic support of 3 hard points, is placed so its center is at the focus of the transmission sphere to be calibrated. The ball surface facing the transmission sphere acts as a convex mirror whose center of curvature is at the transmission sphere focus. An interferogram is taken and the resulting contour map is saved. The ball is removed from its kinematic support, arbitrarily rotated and replaced on the support. Another interferogram is taken and averaged with the first. This process is repeated a number of times although about 10 times is enough to get a good idea of the errors in the transmission sphere as can be seen from this paper with typical examples(3).
The question then comes up, how good is the RBT? For one, it should not be used to calibrate slow transmission spheres; diffractions effects start to creep in around f/7 or slower that compromise the results. On the other hand, for faster transmission spheres rather extensive tests were run at CSIRO by Jan Burke. In a paper(4) covering not only the RBT but several other self-calibration methods for transmission spheres, Burke comes to the conclusion that the RBT gives the most precise and consistent results of all methods tried, but that the RBT is somewhat tedious due to having to move and replace the ball between interferograms. This seems a small price to pay for a robust calibration method that takes but a few minutes to perform.
1 Creath, K. and Wyant, J. C., “Absolute measurement of surface roughness”, Appl. Optics, 29, 3823–7 (1990).
2 Parks, R. E., Evans, C. and Shao, L., “Calibration of interferometer transmission spheres”, OSA, Technical Digest Series, Optical Fabrication and Testing, Hawaii (1999).
3 W. Cai, D. W. Kim, P. Zhou, R. E. Parks, and J. H. Burge, “Interferometer Calibration Using the Random Ball Test,” in International Optical Design Conference and Optical Fabrication and Testing , OSA Technical Digest (CD) (Optical Society of America, 2010), paper OMA7.
4 Jan Burke and David S. Wu, “Calibration of spherical reference surfaces for Fizeau interferometry: a comparative study of methods,” Appl. Opt.49, 6014–6023 (2010)
Optical Perspectives would be glad to send you any of these papers on request to info@optiper.com
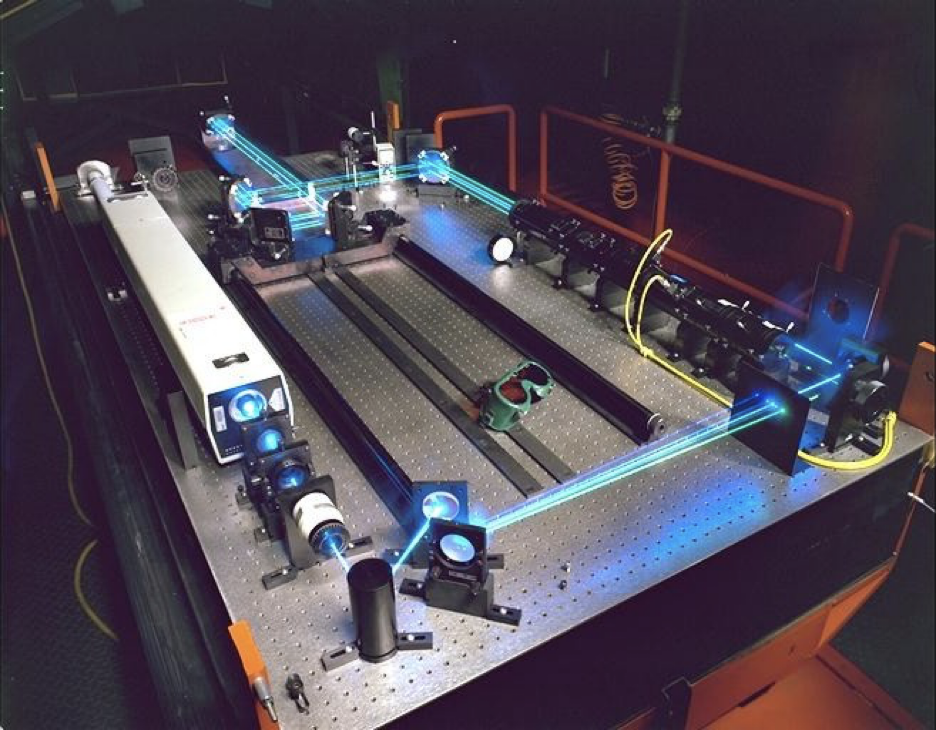
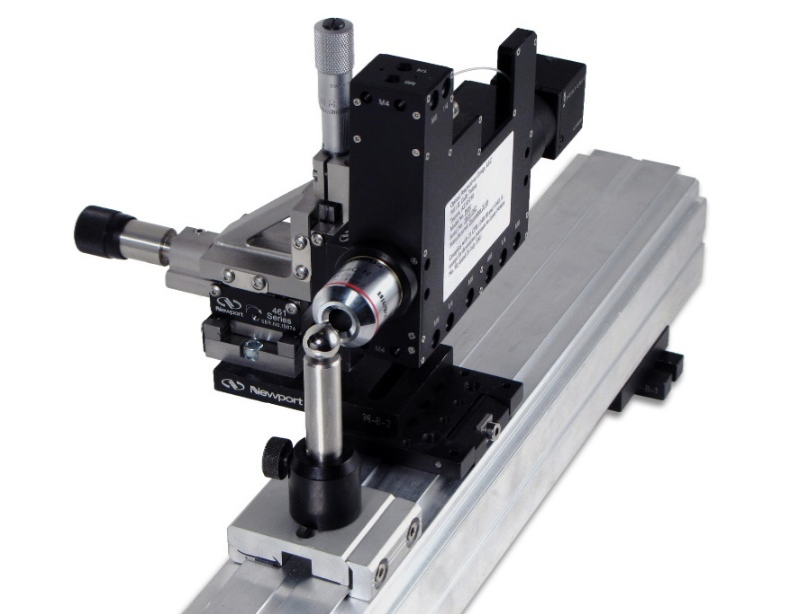
Many research projects begin as tabletop assemblies of optical components to move light from a source through an interaction zone to change the character of the light and on to a detector. The quality of the signal reaching the detector depends on the optical alignment of all the components between the source and detector. The signal quality reaching the detector often means the difference between success or failure of the experiment. In this note we discuss practical issues regarding tabletop optical alignment, like that pictured below, to realize the maximum signal quality with the minimum effort.
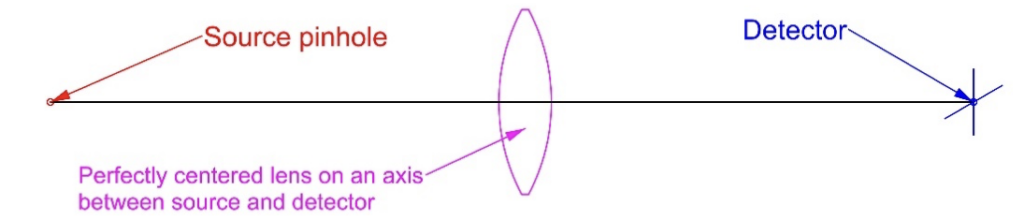
As a simple example, draw a line between the light source and detector to define a required system axis and use a simple positive lens as what interacts with the light in between as shown below in Fig. 1.
Fig. 1 A perfectly centered and tilt free lens relative to the system axis (black line)
As each component is added between the source and detector, optimum alignment is achieved when the light path following the component is unchanged in position or angle, that is, the light reaching the detector arrives at the same location and same angle as before the component was introduced in the light path. Now we discuss how to accomplish this task.
Optical Alignment Using a Bessel beam
We [1], and others [2,3], have found that a Bessel beam propagates through optical components such as lenses and prisms as though the beam was a paraxial ray. As opposed to a real ray that comes to focus at the back focus of a lens illuminated with collimated light and is only visible as a focused spot in the back focal plane, a paraxial ray propagates an arbitrary distance. If we use a Bessel beam as our axis between source and detector, we can observe its position and direction at any point along the beam as in Fig. 2. (Details about Bessel beam creation are in the Appendix)
Fig. 2 Bessel beam created by a point source and Axicon grating detected anywhere along the beam
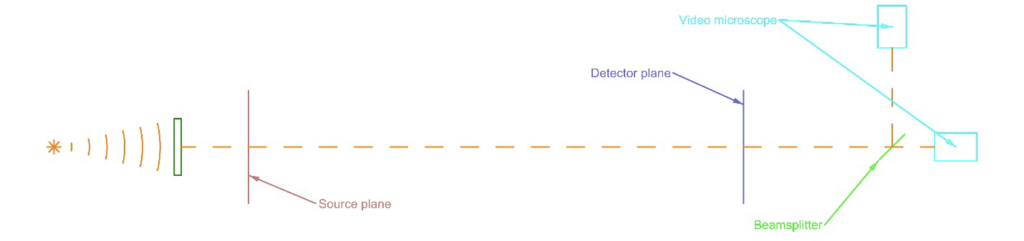
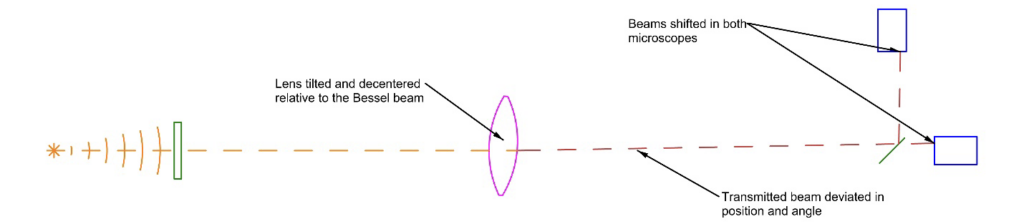
To keep the example simple, but easily extended to multiple components, assume we want to place a lens between the source and detector planes that images an illuminated pinhole source onto a target crosshair in front of a detector. We project a Bessel beam created with a point source of light on the axis of an Axicon grating down the intended path between source and detector as in Fig. 3. Beyond the detector plane we place a beamsplitter and two video microscopes at different distances from the beamsplitter. Because of the different distances we can measure any change in the Bessel beam position and direction in 4 degrees of freedom (DOF).
Fig. 3 The Bessel beam is deflected when a lens with tilt and decenter is inserted in the Bessel beam
Aligning a Lens in the Bessel beam
Now we insert the lens in the beam and move it in position and tilt. This causes the spots seen in the microscopes to move as in Fig. 4. There is one, and only one, position of the lens in 4 DOF for which the spots in the microscopes are centered as they were prior to inserting the lens. Now the transmitted Bessel beam is coincident with the beam before inserting the lens. This is considered perfect alignment of the lens. Since the Bessel beam is as it was before inserting the lens, it is now used as the reference for inserting the next element.
Fig. 4 Initial insertion of the lens deviates the Bessel spot location on both video microscopes
Aligning the Detector and Source to the Bessel beam
Now we must center the detector and pinhole on the reference Bessel beam. First, place the center of a reflecting ball at the design distance from the lens surface. We typically use a Grade 5, ½ inch steel ball. Have the ball rest on the end of a lens post to serve as a kinematic mount for the ball so the ball can be repeatably removed and replaced in the same position as shown in Fig. 5. Remove the beamsplitter and move in an autostigmatic microscope (ASM) so it faces the source and focuses approximately on the center of the ball. Remove the ball from the post and align the ASM with the Bessel beam. Then center the ball to the ASM using the reflection from the center of the ball. The center of the ball is centered on the Bessel beam as shown in Fig. 6.
Fig. 5 Steel ball on a lens post viewed by an autostigmatic microscope focused at the ball center
Fig. 6 The ASM is first centered on the Bessel beam and then the ball centered with the ASM
(At this point you may say I am going about this backwards, but I am doing this to explain the process. Once I finish you will realize that the Bessel beam could have been aligned with the pinhole and detector first, but it is easier to explain this way. The method works either way. Stay with me.)
Now the center of the ball is located in 3 DOF where the crosshair on the detector should go. Take the ASM away from the ball and rotate it 180° so it is centered on the ball but facing the detector. Because the ball hasn’t moved, the ASM, when centered on the ball, is focused where the crosshair on the detector should go. Remove the ball and post and insert and align the detector crosshair as in Fig. 7.
Fig. 7 The ball is used to center the ASM so the ASM can center the detector
The same procedure is used to position the source pinhole. This takes less steps because the ASM is already looking toward the source. The ASM is centered on the Bessel beam at the axial location of the source pinhole as in Fig. 8. Now the pinhole is moved so that it is centered on the ASM crosshair. When the pinhole is illuminated it will be imaged on the detector in the correct location by the lens that is centered on the line between source and detector and is free of tilt relative to the line.
Fig. 8 The ASM is center on the Bessel beam at the axial location of the pinhole source
A Simplified Method of Alignment
This procedure seems a little complicated in that two microscopes are needed to detect both the position and tilt of the Bessel beam. A simpler method uses an additional beamsplitter and a couple plane mirrors to view the Bessel beam at two axial positions simultaneously with an ASM as in Fig. 8.
Fig. 8 Method of viewing the Bessel beam at two separate axial locations simultaneously
With this addition that views the Bessel beam at locations 2x apart, a single ASM is the only optical test instrument needed to do this alignment. The ASM is used to align the lens to the Bessel beam, and then subsequently used to align the detector and source via the use of ball data points.
Clearly this method can be extended to multiple lenses or fold mirrors to bend the beam in any desired direction. Once the first component is centered in the beam free of tilt and decenter, the Bessel beam is coaxial with itself before the first component was inserted so that the beam. This being the case, the Bessel beam is the reference axis for the next component.
Conclusion
While we have explained a simple method of tabletop alignment, we have not said anything about the practical issues of alignment. One of the first is why not just use a laser beam for alignment. The most important answer is safety. The Bessel beam diffracts light over a wide cone angle, so the energy density is low. The bright core of the Bessel beam is smaller in diameter than a laser beam by at least a factor of 10, more typically by a 100. The laser obeys the optics of real rays while the Bessel beam behaves as a paraxial ray and gives more information about how the beam propagates through the interaction zone than a laser.
On the hardware side, everything we have described using an ASM, in this case the Point Source Microscope (PSM), could be done with a classical alignment telescope (AT). The practical problem with an AT is size and weight. It is inconvenient to support an AT at a typical height above an optical table with the degrees of freedom needed to get its axis aligned with another axis. The length of the AT is another problem. The PSM with a right angle adapter occupies 5 to 6 times less space along the axis of the system being aligned. And, unless you have a very contemporary AT the likes of which I am not familiar, you must physically get to the eyepiece and focus adjustment knob. While you must physically move the PSM, all the imaging is done via the video camera so adjustments within the interaction zone can be viewed on a monitor for direct hand/eye coordination.
As a final note, you notice that the introductory picture of the tabletop experiment has a linear slide running down the middle of the table. There is no better method of easily aligning the axis of a mechanical slide to an optically defined axis than using a Bessel beam. End to end alignment to < 1 µm and 1 µradian is achievable.
I hope you find this alternative method of tabletop optical alignment useful and that it aids your productivity.
References
[1] Parks, R. E. and Kim, D., Physical ray tracing with Bessel beams,
[3] Cai. Y. and Lu, X., Propagation of Bessel and Bessel–Gaussian beams through an unapertured or apertured misaligned paraxial optical systems, Optics Communications, 274, 1-7 (2007)
The Point Source Microscope (PSM) and accessories including Axicon gratings are available from Optical Perspectives Group, LLC, info@opticalperspectives.com, 520 529 2950.
Appendix – Side bar – Generation of Bessel beams
The first person I know of who created a Bessel beam was van Heel who made a zone plate with 1 mm concentric circle spacings [4]. The central bright core he found useful for alignment, but he did not realize what he saw was a Bessel beam. Next, motivated by the same interest, alignment, came John McLeod who invented the Axicon[5] that was more efficient at making a beam with a bright core, but his invention was prior to Durnin, et al.[6] who formally discovered Bessel beams where they used an annulus illuminated with a plane wave and a lens to create the beam. Soon after Tururen, et. al. [7] showed you could duplicate van Heel but using photolithography to make a much finer pitched grating of concentric circles to produce Bessel beams. The next major step forward was work by Dong and Pu [8] who showed you don’t have to use a collimated beam to illuminate the Axicon or grating, but you can use a spherical wavefront produced by a point source of light. In this case the Bessel beam starts immediately following the grating and if the grating is large enough, which doesn’t have to be very large, theoretically extends to infinity.
If you wonder how the binary grating of concentric circles creates a Bessel beam think of a diameter of the pattern. It is a linear grating and diffracts collimated light by an angle of +/- λ/d where d is the line pair spacing. The gratings I use have a pitch of 20 µm/line pair giving a diffraction angle of +/- 0.03175 radians for light at 635 nm, or an angle of 1.819°, a pitch that has proved useful enough that I have not had reason to try another.
Now if the +1 order light on one side of the pattern on the diameter interferes with the -1 order light on the other side, the interference takes place about the center of the pattern. If the diameter is rotated through an arc of 180° you create a line of maxima along the normal to the center of the grating pattern. The Bessel beam is sets of conical wavefronts producing a maxima at what would be the star on a Christmas tree. In a real sense, a Bessel beam is not a beam at all but a line of finite length of interference maxima perpendicular to the center of pattern of concentric circles.
If the grating is illuminated by a spherical wavefront produced by a point source of light, the Bessel beam starts immediately following the grating and can in theory go to infinity because for a certain zone in the grating the 1st order diffracted ray is perpendicular to the grating. I prefer this kind of illumination because it is simple to implement, and the beam is continuous starting at the grating. The central core of the Bessel beam does expand slowly as propagates away from the grating, but if you are using a centroiding algorithm to center on the beam this divergence does not affect the sensitivity to the centroid.
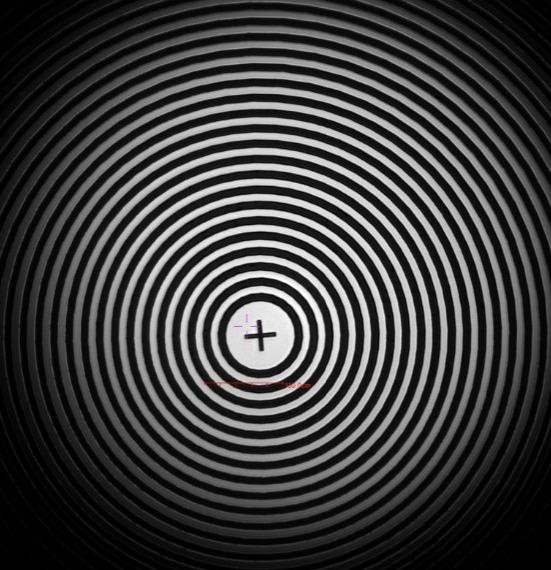
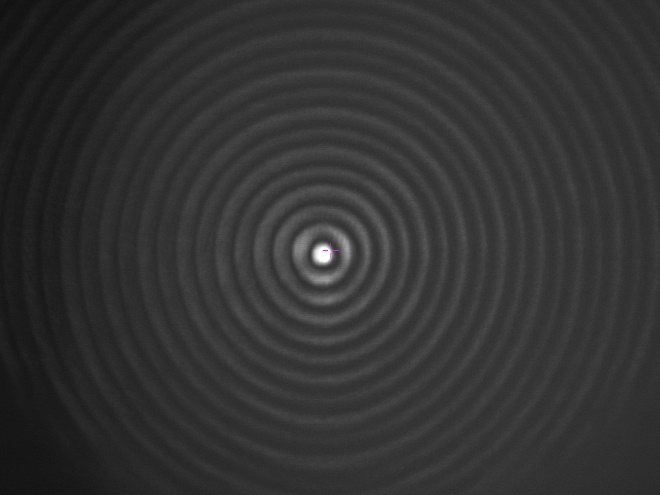
To finish up, here is a microphotograph of the central part of an Axicon grating with 50 lp/mm made by ebeam lithography by Arizona Optical Metrology and the resulting intensity pattern perpendicular to the Bessel beam propagation axis. For scale the FWHM of the core is about 10 µm in diameter.
Further references:
[4] van Heel, A.C.S., “High Precision Measurements with Simple Equipment”, JOSA, 40, 809 (1950).
[5] McLeod, J. H., “The Axicon: A New Type of Optical Element”, JOSA, 44, 592-7 (1954).
[6] Durnin, J., “Exact solutions for nondiffracting beams. I. The scalar theory”, JOSA-A, 4, 651-4 (1987).
[7] Turunen, J., Vasara, A. and Friberg, A., “Holographic generation of diffraction-free beams”, Appl. Opts., 27, 3959 (1988).
[8] Dong, M and Pu, J., “On-axis irradiance distribution of axicons illuminated by a spherical wave”, Optics & Laser Tech.,39, 1258 (2007).
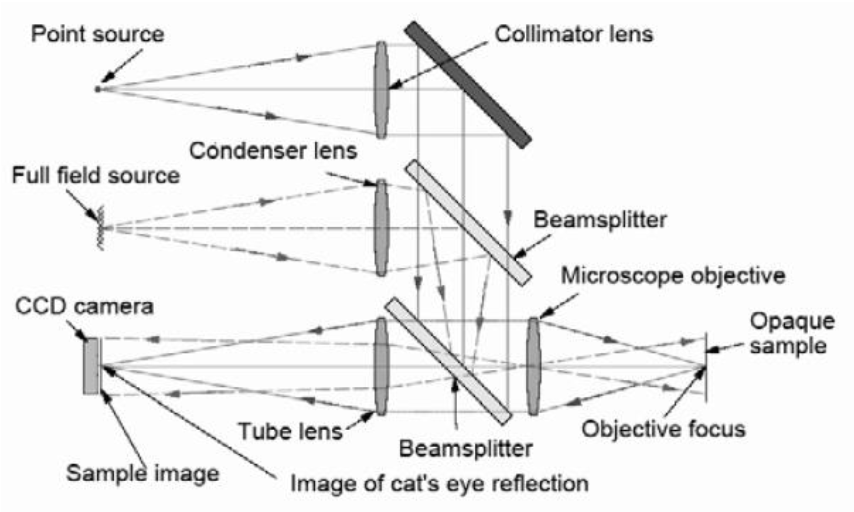
When most people think of a microscope it is one that works in transmission with the light source on one side of the sample and the microscope objective and eyepiece on the other. An autostigmatic microscope (ASM) works in reflection, just like an autocollimator, so the light source is in the microscope body, and is almost always introduced via a beamsplitter close to the objective but between objective and eyepiece as shown in Fig.1.
Fig. 1 An autostigmatic microscope (from Steel[1])
An ordinary reflecting microscope such as one used to examine opaque samples uses an extended light source that is imaged on the entrance pupil of the objective so that the light is made to uniformly flood the sample over the microscope field of view. An autostigmatic microscope is different in this respect in that a crosshair or pinhole source of light is placed conjugate, via the beamsplitter, to the eyepiece object plane. This means that an image of the crosshair or pinhole will be in focus at the focus of the microscope objective. In some very simple cases, the coiled filament of the light bulb making up the source is conjugate to the eyepiece object place so that when the microscope is focused on a surface the filament is in good focus viewed through the eyepiece.
This rather long description of an ASM is necessary because there are almost no literature references to them yet they are a staple in almost every optics shop for use in measuring test plate, or lens surface, radii of curvature. The only literature reference I have found is a paper1 by W. H. Steel titled “The Autostigmatic Microscope”, although he cites a reference to C. V. Drysdale2 in 1900, “ON A SIMPLE DIRECT METHOD OF DETERMINING THE CURVATURES OF SMALL LENSES”. Drysdale started the Technical Optics Department at Northampton Institute in that same year, so it is clear ASMs have been around for over a century.
Going back to Steel, his paper describing an ASM was probably written for the same reason as this paper, his audience had very little idea what an ASM was and what it was used for. His audience happened to be optometrists because he was working at CSIRO, the Australian version of the US NIST, on a job to measure the radii of curvature of contact lenses back in 1983. In the abstract to the paper he stated “The autostigmatic microscope is an instrument for measuring the line-of-sight distance to areflecting surface and is used chiefly to measure the radii of lens surfaces.”, and goes on to say the ASM is an analog of an autocollimator that focuses at a finite distance rather than infinity.
The one other place I have seen mention of an ASM is in Warren Smith’s book, “Modern Optical Engineering” toward the very end where he calls it an autocollimating microscope3 and ascribes to it the same use as Steel. The implication in Malacara’s Optical Shop Testing4 is that one would obviously use an ASM in many cases of testing but ASMs are never mentioned explicitly.
How the ASM works
Before going further we should explain how the ASM works in the two modes used to measure radii. The principles are most easily explained by considering the light source as a pinhole conjugate with the object plane of the eyepiece. In this case, an image of the pinhole will appear at the objective focus and be smaller than the pinhole source by the magnification of the objective. If the pinhole source was 50 μm in diameter, it would appear as 5 μm in diameter at the focus of a 10x objective. Also note, as in Fig. 1, microscopes in the time frame of Steel’s paper used finite conjugate objectives so the objective was the only optical element with power in the microscope. This is a perfect example of a stigmatic optical system, one that images a point of light in the object plane into a perfect point in the image plane.5
If the ASM was focused on a specular surface as in Fig. 2, the light coming from the top part of the objective would reflect off the surface and re-enter the objective at the bottom, and vice versa. This is the so called Cat’s eye, or retroreflection, focus. Notice that the surface does not have to be normal to the optical axis of the objective, the reflected light will always return to the pinhole source on the other side of the meridional plane from which it started out. The reflecting surface can be tilted from normal until none of the reflected light makes its way back into the objective, but whatever light does make it into the objective will always focus on the source pinhole.
Fig. 2 Cat’s eye reflection with surface normal to optical axis of objective (left) and with surface tilted (right)
As a consequence of this retroreflection behavior, the reflected light passing through the beamsplitter to the eyepiece will always focus in the same place laterally in the eyepiece object plane, and this place is exactly conjugate to the pinhole light source. If the objective is not in good focus on the surface the reflected spot will be out of focus but always centered in the same location independent of the tilt of the surface. At best focus the image in the eyepiece object plane will be exactly the same size as the pinhole in the source. Notice that this is the same type of behavior as putting a cube corner reflector in front of an autocollimator, the reflected light spot is stationary even when the cube corner is no longer square with the axis of the autocollimator.
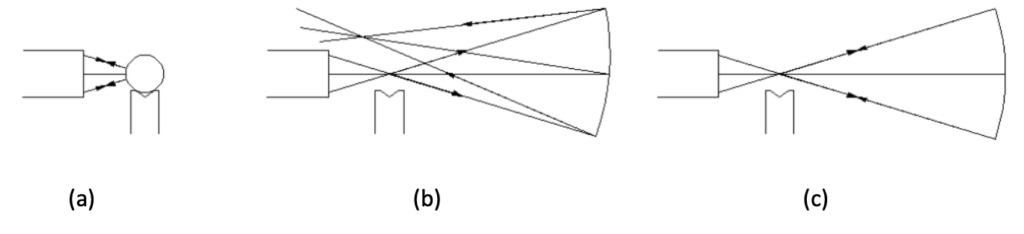
The other location where reflected light returns to the ASM is if the focus of the objective is at the center of curvature of a spherical surface as in Fig. 3a where the objective is focused on the center of the ball, here used as a convex mirror. Light rays exiting the objective follow normals to the surface of the spherical ball, and light is reflected back along the normals into the objective. If, however, the focus of the objective is slightly to the side of the center of curvature as in Fig. 3b, the return light will focus on the opposite side of the center of curvature. This makes the ASM very sensitive to alignment with the center of curvature of a spherical surface. Obviously, just as in the case of the Cat’s eye reflection the return spot of light will be out of focus if the objective focus is not coincident with the center of curvature along the line of sight to the surface.
Fig. 3 Objective focused at the center (of curvature) of a ball, or convex mirror (a), focused near the center of curvature of a concave sphere (b) and focused precisely at the center of curvature (c)
With this background it is now easy to see how an ASM can be used to measure the radius of curvature of a lens or mirror surface. First focus the ASM on the surface near its center and the Cat’s eye reflection will appear in good focus when the ASM is precisely focused on the surface. Adjust the cross hairs or other reference in the eyepiece on the return spot as this reflected image is at the conjugate of the light source, and on the optical axis of the ASM.
Then move the ASM to focus at the center of curvature of the surface by aiming the ASM roughly at the center of the surface and moving in 3 degrees of translation until the return reflected spot lies centered on the eyepiece crosshairs or reference. The ASM is now precisely located at the center of curvature in 3 degrees of freedom. Note the position of the ASM base on a rule or straightedge lying between the ASM and surface. Move the ASM along the straightedge until the Cat’s eye reflection is again in focus and note the scale reading. The difference in the 2 readings as shown in Fig. 4 is the radius of curvature of the surface. Note that by moving along a straightedge from a position where the ASM was centered at the center of curvature means that the ASM is moving along a normal to the sphere and a true reading of the radius of curvature will be achieved.
Fig. 4 Use of an ASM to measure the radius of curvature of a concave mirror
Notice also that this method works equally well for convex surfaces as long as the objective has a long enough working distance to accommodate the radius of the surface. Another issue to keep in mind is that the laws of physics still apply to radius measurement. If the surface being measured has a small diameter relative to its radius of curvature there will be difficulty finding best focus due to the slow f/# of the light cone. On the Cat’s eye side, a higher magnification objective permits greater sensitivity to focus but at the center of curvature may throw away too much light beyond the edge of the surface. In general, use a low magnification objective like 5x for slow surfaces and a 10 or 20x objective for fast surfaces.
My introduction to autostigmatic microscopes
My first job after getting out of school with a MA in Physics and no formal optics education was at Eastman Kodak Company. Virtually the first thing they had me do was measuring the radius of curvature of test plates, the master surfaces against which lens surfaces would be checked using Newton ring interference. The measurement was done with an ASM whose make I forget but it could have been one from Gaertner Scientific6, a company that still sells all the parts needed to make an ASM. Another project at Kodak got me into issues of aligning one optic to another but the idea of using an ASM as an alignment device did not click in my mind.
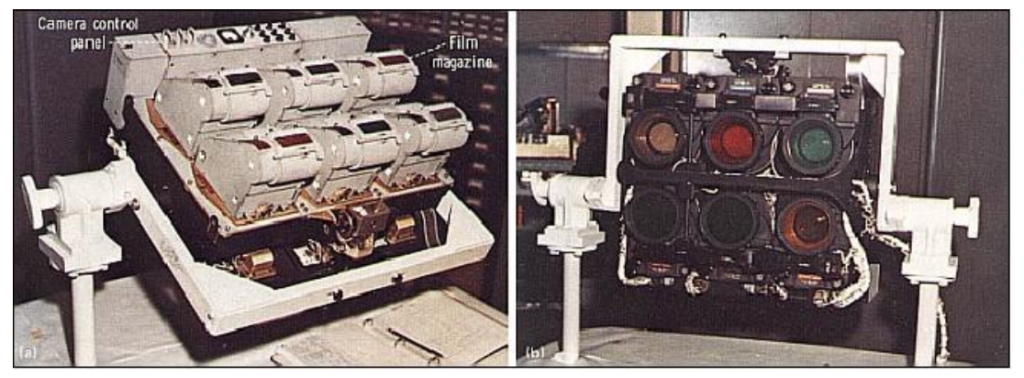
From Kodak I went to Itek Corporation (now a part of Goodrich) in Lexington, MA. One of my jobs there was to adjust the 6 cameras in the S-190 survey instrument7, flown on Skylab in the summer of 1973, for matched distortion and magnification. Each camera operated in a different spectral band and the idea was to be able to overlay the 70 mm format negatives from the different cameras and have details in the film match up to +/- 1 μm. This meant each nominally 150 mm focal length camera had to beadjusted to have nearly identical field heights at the edges of the field even though some of the spectral bands were outside the visible spectrum into the IR.
Fig. 5 S-190A Multispectral Photographic Camera System
We used a nodal slide lens bench to do the measurement and projected a collimated beam of white light from a pinhole source into each of the cameras. The point images in the camera focal planes were detected with a microscope that had a quad cell photo detector in the eyepiece object plane. There was a beamsplitter so that the images could be viewed either visually or electronically. The visual image allowed us to get things aligned initially but the data were taken for all 6 cameras using the electronic quad cell so all the distortion and magnification data were all treated the same. This use of a microscope with an electronic detector put another piece of the ultimate ASM design in the back of my mind.
From Itek I went on to work at Frank Cooke, Inc. in central Massachusetts and learned how optics were really made instead of just testing them. One of the items made there was a hyper-hemispherical glass dome about 180 mm in diameter and 6 mm thick. There was a reasonably tight spec on the concentricity of the inner and outer surfaces of the dome, that is, the centers of curvature of the 2 surfaces were supposed to be within 50 μm of each other in all 3 degrees of freedom.
The person in charge of testing at Cooke’s was Raymond Boyd who had formerly worked for American Optical in Southbridge, MA. To test for concentricity, Ray effectively made an ASM by inserting a piece of optical fiber in a filar eyepiece much as in Fig. 6.
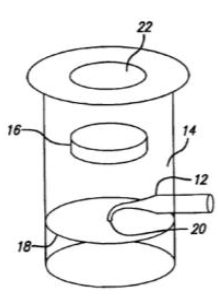
Fig. 6 Illustration from US Patent 6,924,897 showing an eyepiece with a fiber point light source. 12 is the fiber preform, 20 the drawn out tip, 18 the eyepiece focal plane and 16 the eyepiece lens
Ray had worked with Elias Snitzer, one of the early inventors of fiber optics at American Optical, and had access to fiber optic pre-forms that were about 3 mm in diameter. Ray would use an alcohol flame to draw the preform out into a small diameter fiber and bend the tip 90 degrees to make a rudimentary point source. He used a microscope illuminator focused on the large end of the preform as the light source. When the fiber tip was at the centers of curvature of the dome, point images were returned from both surfaces and the distance separating them could easily be measured with the filar scale in the eyepiece focal plane.
This simple optical device could do in minutes what would otherwise be a complex mechanical metrology problem requiring a good rotary bearing and several contact measurements along with some math to determine the same knowledge of the concentricity of the surfaces. We used similar fibers to test such things as fast elliptical reflectors as described in a brief paper8 I wrote after moving on to run the Optics Shop at the Optical Sciences Center at the University of Arizona.
While at Optical Sciences I found that EG&G was making an eyepiece for a radiometric instrument they sold that was almost identical to the one Ray Boyd had used at Cooke’s. EG&G used the eyepiece backwards to how we intended to use it; the tip of the fiber picked up light coming toward the eyepiece from the sample being viewed and a fiber bundle took that light to a sensitive photometer to record its value. We illuminated the end of the fiber bundle with a bright source and let the light exit the tip in the eyepiece headed out of the microscope through the objective. When the objective was focused on a specular surface the light from the fiber came back in retroreflection directly on the fiber tip in the eyepiece. This was a great, commercially available, solution to making a point source eyepiece for an ASM. Unfortunately, not many years later EG&G stopped making these eyepieces.
About this time I left the University to start a consulting company called Optical Perspectives Group, LLC along with a colleague, William P. (Bill) Kuhn. One day we got call from a local company that had designed a complex lens for a laser writer system they were making. The system had 6 lenses, some of which were rectangularly edged toroids, and a spherical mirror, all of whose centers of curvature were supposed to lie on a straight line. Our job was to come up with a method of aligning the lenses and mirror so this was the case.
We immediately recognized this was a perfect job for an ASM which we put together with Thorlabs parts and an analog CCD camera. The ASM was mounted in the chuck of a milling machine and the optical bench holding the lens elements was set on the mill table that we used as a large x-y-z stage. With this set up we were able to get to the centers of curvature of all the elements by cranking the mill table over the length of its travel. In the case of the toroidal lenses we would get back line images instead of a circular spots but the lines were just as easy to align as the spots.
Using this crude ASM and the mill we were able to align the lens system in about 4 hours and get better performance from the system than they had previously by another method that took about 2 weeks. The company was delighted, but the system needed to be assembled in a clean room environment and they could not put the mill in the clean room.
This was the beginning of the original Point Source Microscope (PSM), an ASM small and light enough to be held on the ram of a coordinate measuring machine (CMM) in place of the usual mechanical touch probe. Many advances in technology had been made over the years since the ASM put together at Cooke’s. There were affordable CCD cameras and single mode fiber light sources in the visible. Also, microscope design had changed from a finite conjugate to infinite conjugate version where the lightbetween the objective and “tube lens” was collimated. The reason for this change was that it made customizing microscopes much easier since the distance between the eyepiece and objective did not have to stay fixed. It also meant that in reflecting microscopes the beamsplitter that was necessary to introduce the light from the source no longer introduced aberrations into the converging beam of light in finite conjugate microscopes.
The initial major problem with the new PSM was there was no easy way to mark where the Cat’s eye reflection returned on the detector. Our initial solution was to place a Magic Marker dot on the analog monitor faceplate. This worked but was neither elegant nor precise. We then realized that a Shack cube, such as used in a Shack cube interferometer9, would be just what was needed to produce a reference spot of light to be the indication of where to bring the light to focus from the center of curvature of the surface we were trying to align. Fig. 7, taken from US Patent 6,924,897, shows the original PSM layout and the Shack cube (#30).
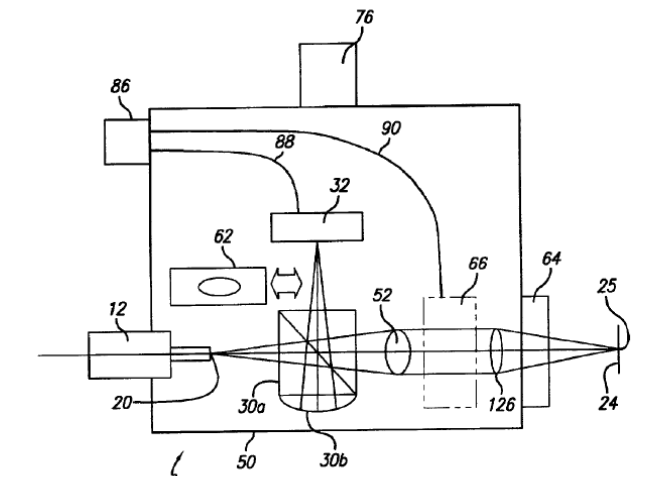
Fig. 7 Layout of the original Point Source Microscope
The Shack cube is a cube beamsplitter with plano-convex lens cemented to one side so that its center of curvature is conjugate to the tip of a single mode optical fiber (20) and the analog CCD camera. The objective is #126 and the tube lens is #52 with collimated space in between. While this design worked very well for our customer, we realized almost immediately that this was not a very smart design; once the return spot was centered behind the reference spot there was no way to center any better. This limited our centering ability to about 5 μm. At the same time useful technology was moving forward at a fast pace.
Bill looked at a combination of the short comings of this original design and advances in technology to come up with what is now sold as the PSM, and is shown schematically in Fig. 8. There are many improvements on the original but the one to address the major flaw of the first was to use a digital CCD camera coupled with National Instruments LabView software that could centroid on the return spot of light. This meant that when the Cat’s eye spot was first obtained in good focus the software could place an electronic crosshair on the video display to define the lateral zero position on the display to a fraction of a μm. Other return spots could then be located relative to the crosshair to the same precision.
Fig. 8 A schematic diagram of the optical paths within the PSM
Going back to Fig. 8, other new features included an internal LED light source and diffuser to provide Kohler illumination for full field imaging so the PSM could be used as an ordinary video microscope as well as an autostigmatic one for alignment purposes. Where the original PSM had an external fiber source the new one has a single mode fiber pigtailed to a red laser diode. The two light sources are adjusted so the autostigmatic focus is parfocal with the full field image plane. Another feature of the laser diode light source is that it has a bright and dim mode. In the bright mode the light is bright enough to be seen under ambient lighting so that it is easy to find the return reflected light spots. However, this intensity is sufficient to saturate the camera in most cases so the dim mode is used for the electronic centroiding.
A further feature is the use of infinite conjugate optics so that when the objective is removed from the PSM it becomes an autocollimator. Thus the PSM is 3 distinct instruments in one, a video imaging microscope, an ASM and an autocollimator with an exceptionally large angular capture range.
Using the PSM for alignment
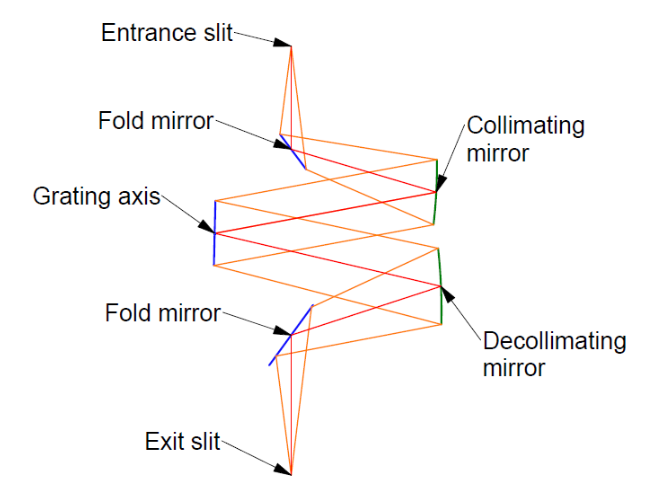
Now that the development of the PSM and the use of it to measure radii of curvature have been described, we will describe a simple but non-trivial alignment situation. Assume we want to align the optics in a 2 mirror grating spectrometer that, when aligned, looks like Fig. 9. We will assume that the 2 slits and the axis of the grating are fixed by the mechanics of the lens bench on which the optics are mounted. From a combination of the mechanical and optical drawings of the instrument we know where the centers of curvatures of the collimating mirrors should be relative to the slits and grating axis before the optical path is folded to the slits. Further, the 2 fold mirrors should be set so that light focused at the entrance slit exits in focus at the exit slit. Also assume that all 4 mirrors that will be aligned are held in mounts with 3 adjustment screws so they may be tilted in 2 directions and displaced axially in the direction of the screws by turning all 3 simultaneously.
Fig. 9 A two mirror grating spectrometer in its final configuration
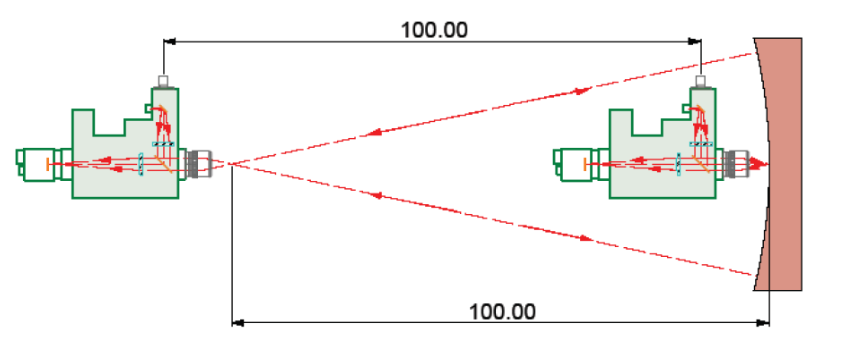
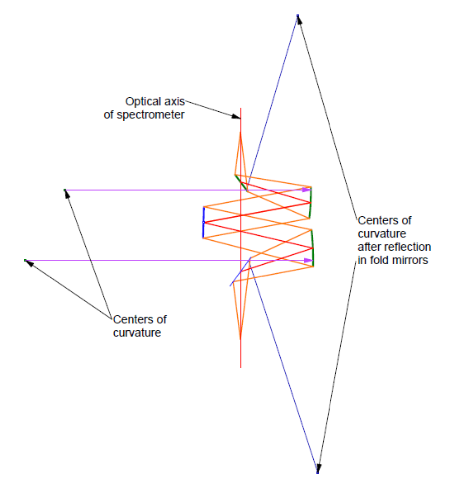
Fig. 10 shows where the centers of curvature of the collimating mirrors are (violet) and where they are reflected in the fold mirrors (blue) when the fold mirrors are properly aligned.
Fig. 10 The center of curvature locations of the collimating mirrors directly and as folded
To perform the alignment the optical bench on which the mirrors and grating are mounted are temporarily mechanically pinned to an alignment fixture plate into which holes have been bored at the center of curvature and slit locations. Into these holes a post is placed on the top of which is a spherical steel ball. An example of this type fixture is shown in Fig. 11 where the posts are lens mount posts and the balls sit kinematically located in the conical chamfer in the posts. A collar on the post keeps the distance above the fixture constant.
In Fig. 11 the PSM is focused on the center of a steel ball located where the center of curvature of the relay mirror in the black optical bench should be located relative to the bench as defined by the aluminum plate fixture and the pinning of the bench to the alignment plate. This approach permits the alignment to tolerances that are as good as the balls can be located mechanically.
Fig. 11 The PSM focused on the center of a steel ball sitting on the post located in the bored hole in the aluminum alignment plate.
In the case of the spectrometer the same approach is used. First a post and ball are placed at the center of curvature of the collimating mirror. The PSM on a 3 axis stage is placed facing the mirror and adjusted until the objective focus is at the center of the ball in all 3 degrees of translational freedom. Half inch diameter, Grade 5 steel balls are excellent convex mirrors. The ball is removed from the post so the light from the objective illuminates the mirror and is refocused near the objective focus. The 3 screws on the mirror are used to bring the center of curvature of the mirror to the precise focus of the objective in all 3 degrees of freedom. This is why 3 adjustment screws are needed on the mirror so that the mirror can be adjusted not only in 2 angles but axial translation to get best focus as well.
This step is repeated for the decollimating mirror. The post is moved to that hole in the plate, the PSM is moved over and focused on the center of the ball, the ball is removed, and the mirror adjusted with the 3 screws. Note how the PSM is used to place an optical conjugate that cannot be touched physically in proper relationship to a feature that is mechanical and can be touch probed mechanically. The PSM is a transfer device from an ethereal optical conjugate to a rigid mechanical datum, or vice versa.
Now the fold mirrors can be adjusted by using holes located where the centers of curvature should appear as reflected in the correctly adjusted fold mirrors. In Fig. 11 there are a set of 4 holes toward the front edge of the alignment plate. The hole nearest the edge of the plate is where the center of curvature of the relay mirror is after the fold mirror is installed in the black optical bench. The idea is the same for the spectrometer. The PSM is set up facing the fold mirror and centered on the ball. The fold mirror is then adjusted in 3 degrees of freedom until the center of curvature is centered on the PSM focus. Notice that it takes 3 adjustments on the plane fold mirror to accomplish this alignment.
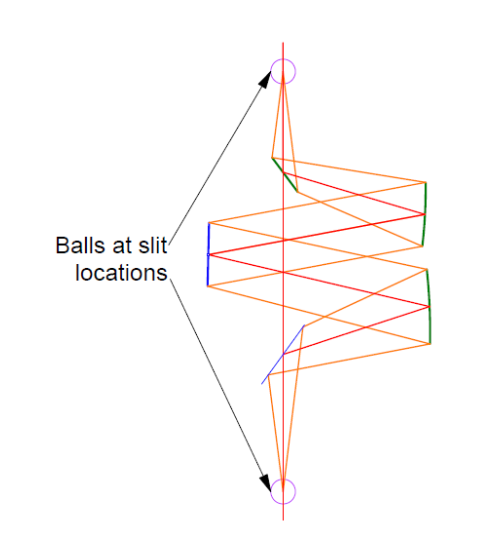
Once both fold mirrors are adjusted a post and ball can be placed where the exit slit is to go, and the PSM aligned to a ball at the entrance slit as in Fig. 12. Only if the grating is adjusted so the double pass reflection of the entrance slit lies on the exit slit will light return to the PSM focus. This 0 order reflection from the grating establishes the zero angle setting on the grating rotation axis and allows a correction for any tilt in the orthogonal direction.
Another aspect of this final alignment is that the return spot to the PSM will not be a perfect spot but will be aberrated due to the optical design of the spectrometer. But the aberrated spot should be of a size and shape consistent with the design of the spectrometer. If it is not the expected spot it is clear something is wrong with one or more of the optics. Actually, at each previous step in the alignment a serious figure error in any of the optics will be noticed. The PSM has the ability to sense asymmetry in the image down to a level of 1/8th to 1/10th wave. If there are figure errors of these magnitudes, they will be apparent in the “Star test” image10, 11,12 as each of the optics is aligned. This means that errors in assembly can be caught before the entire system is put together, and before having to figure out which element is to blame for the lack of system performance.
Fig. 12 Check of the grating zero angle by double passing the spectrometer off a ball at the exit slit
Conclusion
We have explained what an autostigmatic microscope is, and how it can be used for measuring optical surface radii. I have also described how a modern version of an ASM was developed over a number of years as my familiarity with its use expanded and as technological advances were made in many useful components that became part of the final Point Source Microscope. Finally we showed an application of using the PSM for alignment of optical components and showed how an ASM acts as a transfer device from ethereal optical conjugates to fixed mechanical references.
References
1 Steel, W. H., “The Autostigmatic Microscope”, Optics and Lasers in Engineering, 4, 217-27, (1983).
2 Drysdale, C. V., “ON A SIMPLE DIRECT METHOD OF DETERMINING THE CURVATURES OF SMALL LENSES”, Transactions of the Optical Society of London, pp. 1-12, 1900.
3 Smith, W. J., Modern Optical Engineering, 3rd ed., McGraw-Hill, New York, (2000), p. 584.